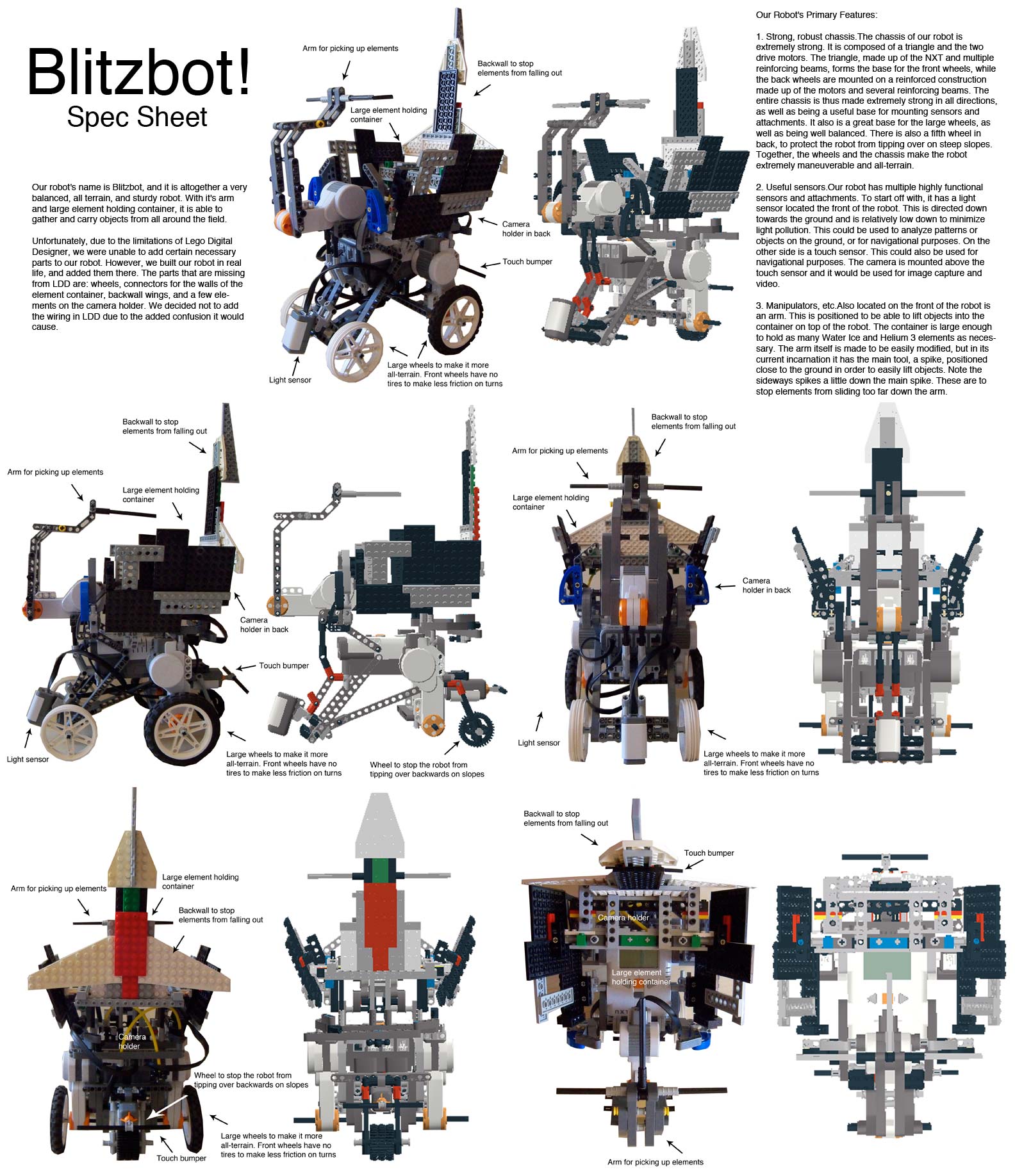
Our robot's name is Blitzbot, and it is altogether a very balanced, all terrain, and sturdy robot. With it's arm and large element holding container, it is able to gather and carry objects from all around the field.
Unfortunately, due to the limitations of Lego Digital Designer, we were unable to add certain necessary parts to our robot. However, we built our robot in real life, and added them there. The parts that are missing from LDD are: wheels, connectors for the walls of the element container, backwall wings, and a few elements on the camera holder. We decided not to add the wiring in LDD due to the added confusion it would cause.
Our Robot's Primary Features:
1. Strong, robust chassis.
The chassis of our robot is extremely strong. It is composed of a triangle and the two drive motors. The triangle, made up of the NXT and multiple reinforcing beams, forms the base for the front wheels, while the back wheels are mounted on a reinforced construction made up of the motors and several reinforcing beams. The entire chassis is thus made extremely strong in all directions, as well as being a useful base for mounting sensors and attachments. It also is a great base for the large wheels, as well as being well balanced. There is also a fifth wheel in back, to protect the robot from tipping over on steep slopes. Together, the wheels and the chassis make the robot extremely maneuverable and all-terrain.
2. Useful sensors.
Our robot has multiple highly functional sensors and attachments. To start off with, it has a light sensor located the front of the robot. This is directed down towards the ground and is relatively low down to minimize light pollution. This could be used to analyze patterns or objects on the ground, or for navigational purposes. On the other side is a touch sensor. This could also be used for navigational purposes. The camera is mounted above the touch sensor and it would be used for image capture and video.
3. Manipulators, etc.
Also located on the front of the robot is an arm. This is positioned to be able to lift objects into the container on top of the robot. The container is large enough to hold as many Water Ice and Helium 3 elements as necessary. The arm itself is made to be easily modified, but in its current incarnation it has the main tool, a spike, positioned close to the ground in order to easily lift objects. Note the sideways spikes a little down the main spike. These are to stop elements from sliding too far down the arm.