Our Final Phase Two Robot
Over time, our robot has evolved a lot. For your convenience, I have created a Robot Evolution Timeline. Click on the picture below to check it out!
Also for your convenience, here are screen shots of the updated LDD file. There are still a lot of missing pieces due to the limitations of this program :( Oh well! Remember to click to enlarge!
Front:
Side:
Back:
Artistic!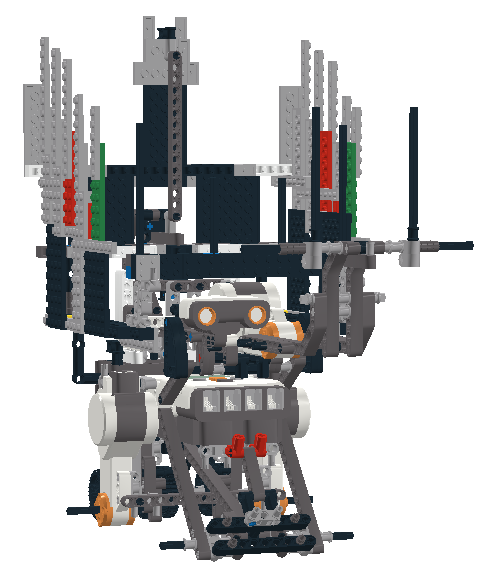
And now... A detailed robot spec sheet! It is very similar to the one on the Phase One Robot Design Page, but updated with our robot's newest features!
Robot Features:
1. Strong, robust chassis.
The chassis of our robot is extremely strong, it is composed of a triangle and the two drive motors. The triangle, made up of the NXT and multiple reinforcing beams, forms the base for the front wheels, while the back wheels are mounted on a reinforced construction made up of the motors and several reinforcing beams. The entire chassis is thus made extremely strong in all directions, as well as being a useful base for mounting sensors and attachments. It also is a great base for the large wheels, as well as being well balanced. There is also a fifth wheel in back, to protect the robot from tipping over on steep slopes. Together, the wheels and the chassis make the robot extremely maneuverable and all-terrain.
2. Useful sensors.
Our robot is equipped with various highly functional sensors and attachments. To start off, one of our oft-used sensors is the compass sensor, which allows us to figure our exact position relative to where we want to be. Also attached is a gyro sensor which allows us to calculate both the speed of a rotation, and the amount we have rotated. Added to these is an acceleration sensor, allowing us to detect acceleration in three dimensions as well as tilt. The last sensor we are using is a ultrasonic sensor, which added to the compass sensor may be used to align to a great degree of accuracy.
3. Manipulators etc.
Also located on the front of the robot is an arm, this is positioned to be able to lift objects into the container on top of the robot, the container is large enough to hold as many loops as necessary, and also has high sides to stop badly throws loops bouncing out. The back especially is very high and sturdy. The arm, after several modifications ended up being moderately long and able to spear loops easily with either one of its two prongs. Also important is the slight counterweight on the front of the robot to balance out a slight overabundance of weight in back when going over the ridge and craters.
|

